二叉树、BST(二插搜索树)、AVL(平衡二叉树)、B-树(平衡多路查找树)、B+树、KD树、KDB树、BKD树
二叉树
子树最多只有两棵的树
前序遍历:根结点 —> 左子树 —> 右子树
中序遍历:左子树 —> 根结点 —> 右子树
后序遍历:左子树 —> 右子树 —> 根结点
满二叉树
每层节点是满的树
完全二叉树
n个节点和满二叉树一致,即满二叉树缺失最后一行的最后几个节点
BST(二插搜索树)
目的是为了提高搜索性能,采用二分思想,每个节点的值大于其任意左侧子节点的值,小于其任意右节点的值,具体实现时为了效率一般会使用二分思想,使左右子树节点数量尽量平均
AVL(平衡二叉树)
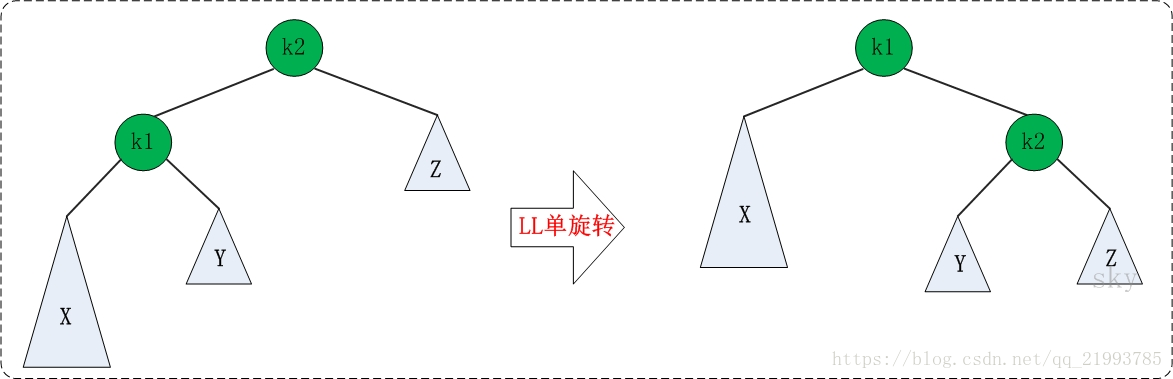
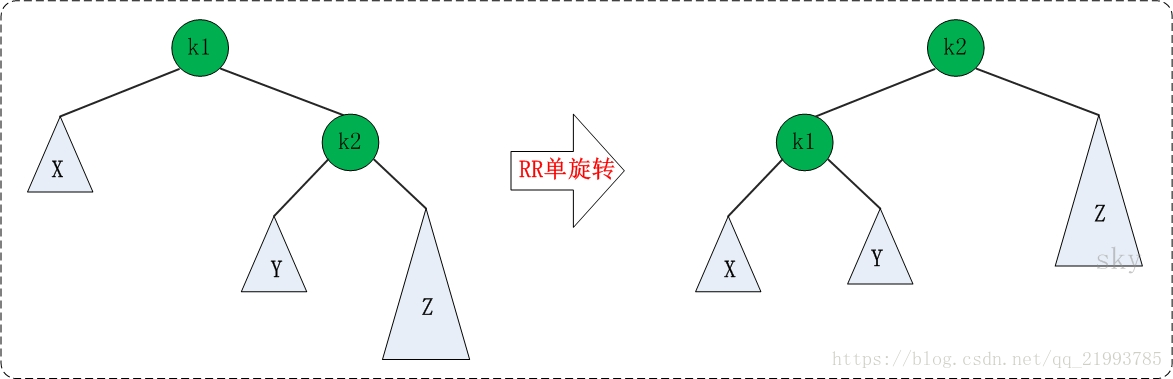
在符合二插搜索树的前提下,满足任何节点的两个子树的高度最大差为1,在插入或者删除数据时,可以通过旋转使树重新平衡
LL旋转
RR旋转
LR旋转

RL旋转

B-树(平衡多路查找树)
-
每个节点最多有m个孩子
-
除了根节点和叶子节点外,其它每个节点至少有Ceil(m/2)个孩子
-
若根节点不是叶子节点,则至少有2个孩子
-
所有叶子节点都在同一层,且不包含其它关键字信息
-
每个非终端节点包含n个关键字信息(P0,P1,…Pn, k1,…kn)
-
关键字的个数n满足:ceil(m/2)-1 <= n <= m-1
-
ki(i=1,…n)为关键字,且关键字升序排序
-
Pi(i=1,…n)为指向子树根节点的指针。P(i-1)指向的子树的所有节点关键字均小于ki,但都大于k(i-1)
下面是一个3阶的B-树

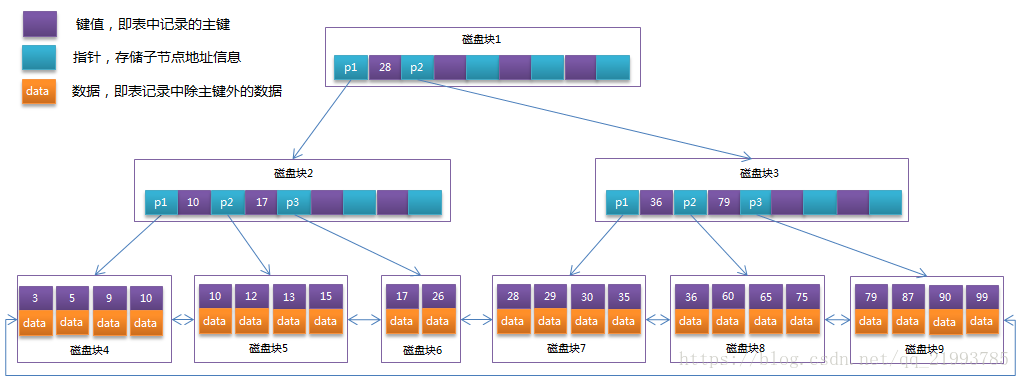
B+树
B+Tree是在B-Tree基础上的一种优化,数据量较大时会导致B-Tree深度较大
B+Tree相对于B-Tree有几点不同:
- 非叶子节点只存储键值信息。
- 所有叶子节点之间都有一个链指针。
- 数据记录都存放在叶子节点中。
KD树
空间树的一种,使用的还是二分思想,只不过节点数据是多维的,重点是如何划分数据
顺序遍历法:即对于点(x1, x2, x3, x4 ….),第一次按x1的维度来切分,第二次按照x2的维度来切分,切到最后一个维度之后又回到x1的维度
KDB树
KD树和B+树结合体,但是可以预见的是存在大量空间浪费
BKD树
BKD树由多个可修改的KDB树构成,是一个完全二叉树,叶子节点存储的和KDB树一模一样
BKD树不会被修改,添加新数据时,在内存中有一个完全二叉树作为buffer,size=M。外部存储(硬盘)里保存的第i棵树,要么是空的,要么是2^i * M 这么大
1、每次插入的时候,如果buffer没满,那就直接在内存里插入
2、如果满了,找到第一个空的树,将前面所有做merge
这样最多只会有M的空间浪费